GPIO Setting for Different Speed
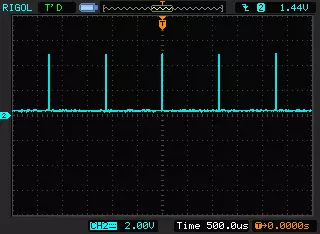
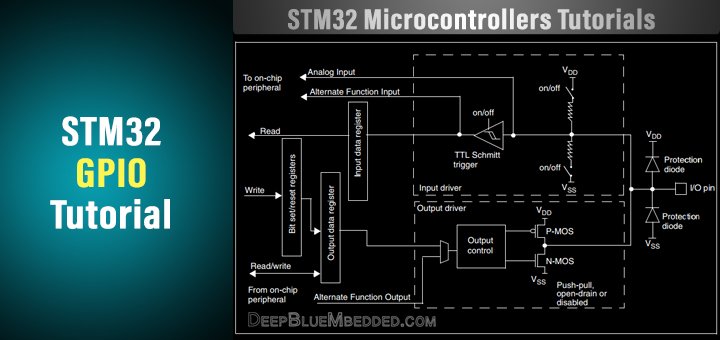
前言 這邊因在操作SPI,但SPI速度提升超過10MHz會出現CPOL/CPHA錯位的怪異現象,後來查詢許多方式,發現貓膩在GPIO設定上面,這邊針對踩雷部份GPIO SPEED SETTING做詳細設定說明,不限定在SPI上面所有通訊協定皆通用。 STM32 GPIO Ports 在STM32上面GPIO結構如下圖 STM32 GPIO Speed STM32CubeMX配置GPIO 輸出引腳,都會有速度GPIO_InitStruct.Speed 不同MCU型號,速度選項,有些有3個,有些有4個。一般定義在xxx_gpio.h文件中 STM32CubeMX配置,這邊default為設置最低因此如果要更動到其他高傳輸速度需要更動設定 PS:如果输出速度和配置速度不匹配,會明顯看到波形不正常這邊選用高低速差異如下 參考
GPIO Setting for Different Speed Read More »