State observer sensorless algorithm
前言
State observer sensorless algorithm是ST的SDK所使用的方式,這邊會來深入解說observer+PLL算法以對應ST MCSDK所要調整參數,讓在調整參數上更為快速能準確完成任務目標,所參考資料為ST MCSDK 6.3.0版本
以下是眾多sensorless馬達控制這次僅針對State observer

永磁同步馬達的數學模型
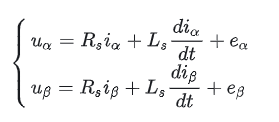
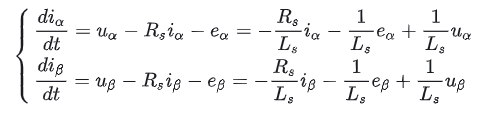
永磁同步電機,在α-β軸系下的電壓方程的一般表達形式
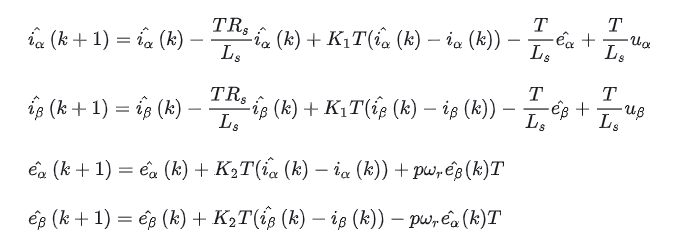
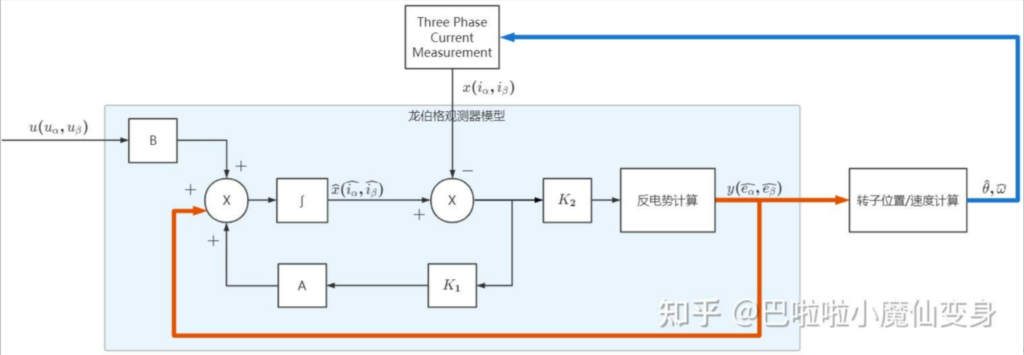
對龍伯格觀測器進行離散化,設採樣時間為T,則離散化後的觀測器為右圖
鎖相環(Phase-Locked Loop)
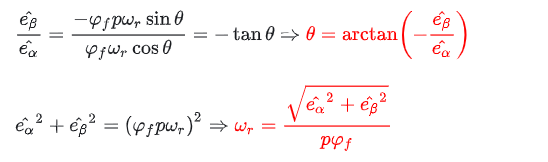
上面已經算出了反電勢的估計值,直接透過反正切函數就可以分別計算出位置和速度了,如下:

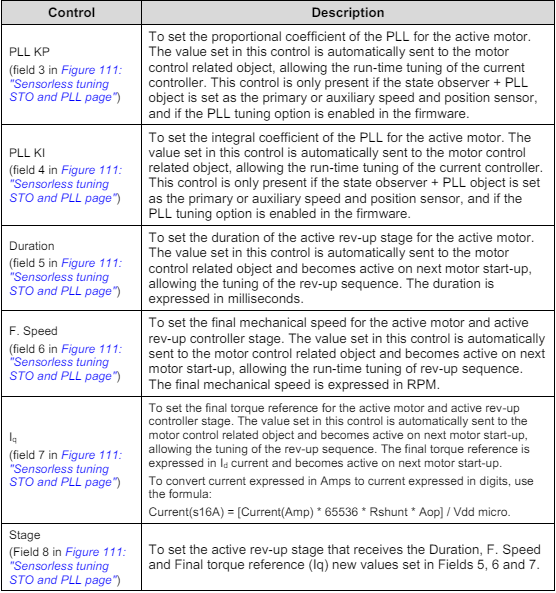
Sensorless tuning STO & PLL page
針對ST參數有一個對照表如下