

Theory For FOC Control-3
前言
上篇針對回授接收到訊號做分解後,這邊要進入輸入訊號的介紹
PWM到SPWM
因我們所要驅動的是三相逆便電路,如果單單開關會得到類似6步方波的控制不夠平滑,這邊我們想要使其平滑就要引入2個概念
- PWM
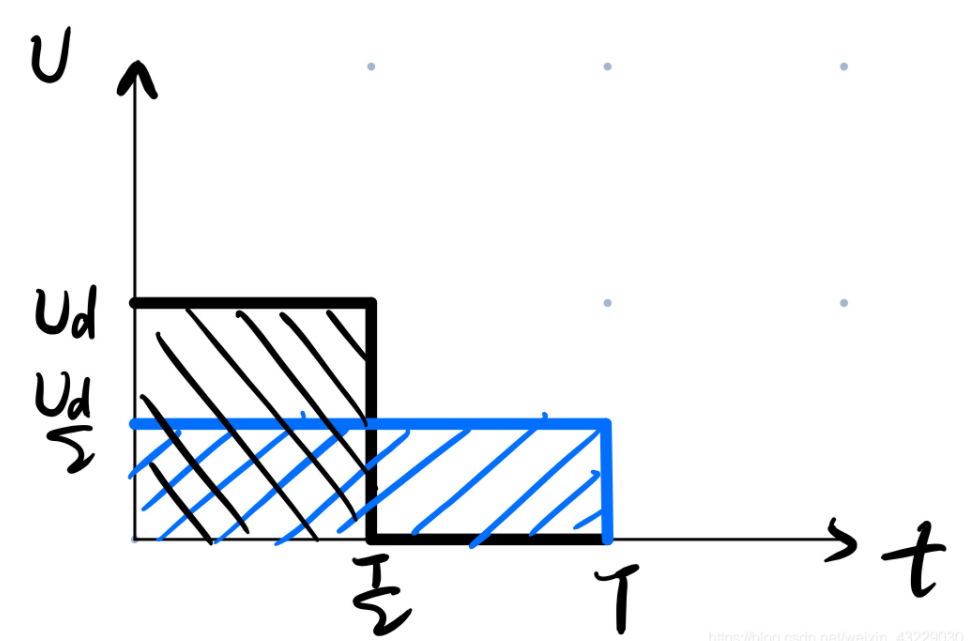
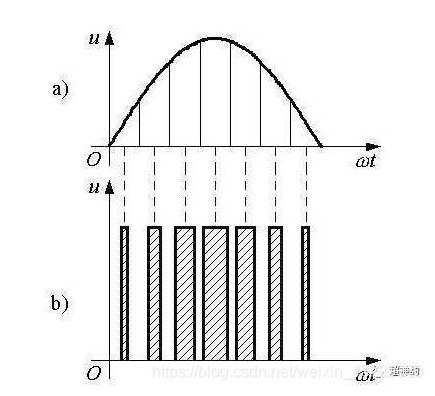
- 面積等效定理
PWM相信有在控制馬達的都不陌生,基本上如下圖去控制操作電壓的佔比頻率,來達到等效電壓的效果
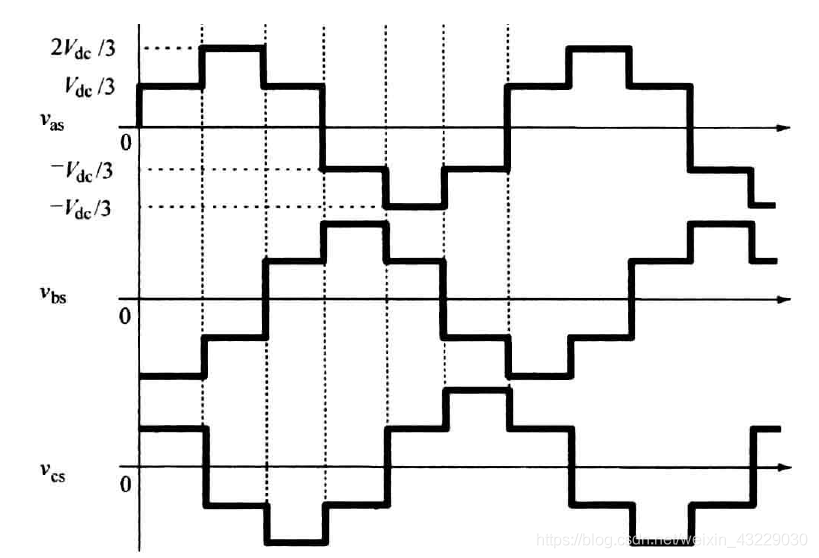
由上我們在進階一點把弦波全部等效成方波如下圖
這邊就延伸出2種控制波形
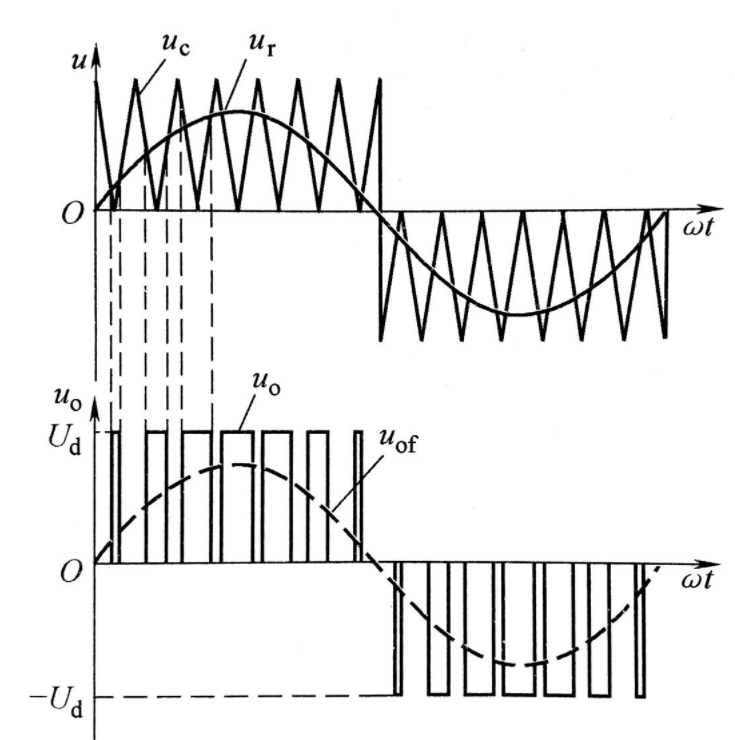
到目前為止我們就了解到單一相正弦波控制輸入PWM,下一步我們要延伸成3相來達成控制BLDC
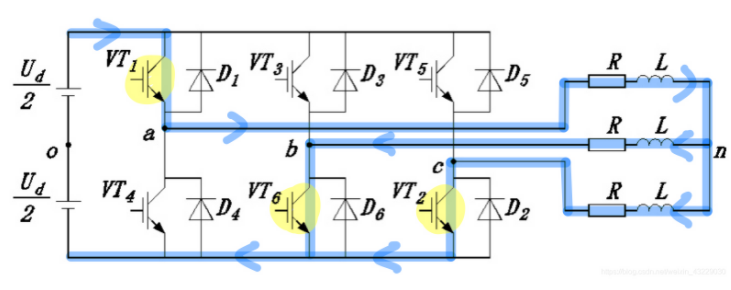
三相電壓控制


由右圖我們可以列出上圖方程式,然後再由3組橋臂我們可以得到8種組合
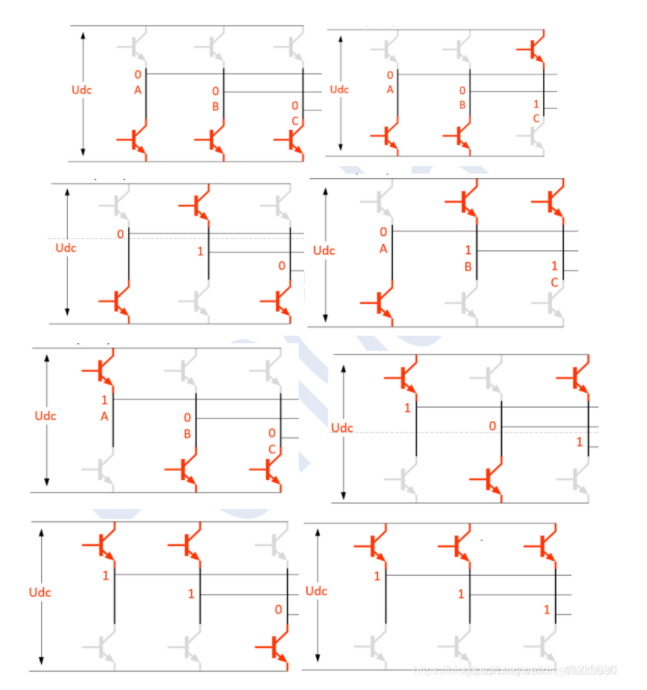
這邊我們舉其中一個狀態為例如下圖,並由左至右逐步簡化最後得到最右邊的簡化圖

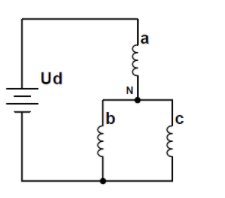
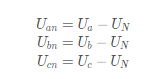
由上圖我們可以獲得以下方程式


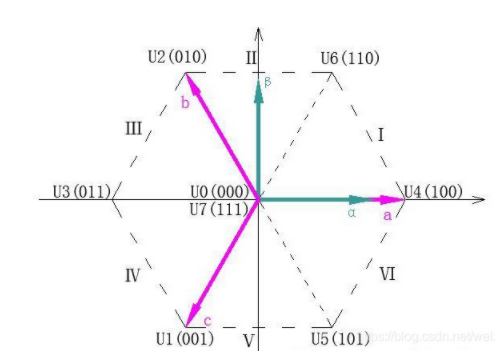
由上面其中一種狀態推演,我們可以獲得下列全部狀態表格,然後在近一步圖形化成最右邊圖

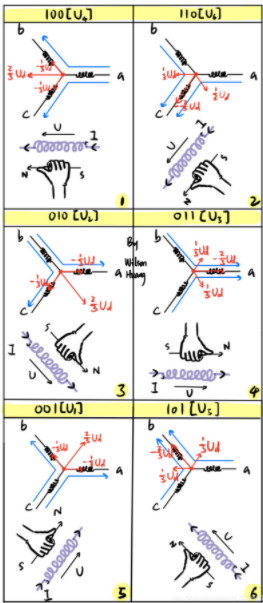

但這邊得到的圖與網路給的標準圖方向不同,這邊就是重點所在abc 座標軸代表的是空間向量的方向,稱之為三相静止座標系,而不是馬達的等效模型,馬達模型上的向量轉換到三相静止座標軸上的向量需要做一个簡單的變換——負變正,正變負,做鏡向翻轉後就跟網路相同如下
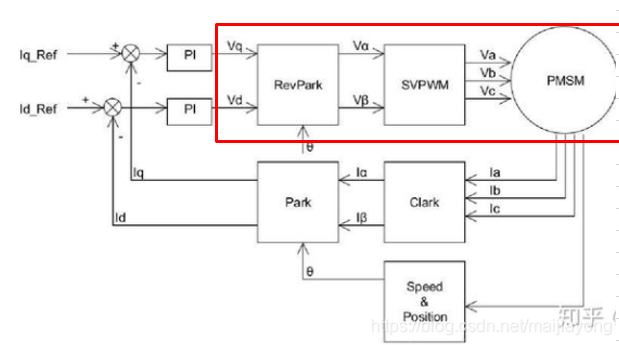
有了向量組合,與PWM概念後接下來就是把其結合成SVPWM(Space vector PWM),下面3個為主要要點
- 輸出電壓由重復地開關兩個相鄰的有效向量與零向量 的動作產生
- 輸出電壓的 θ 角取決於兩個相鄰有效向量的相對開關時間
- 輸出電壓的幅值取決於兩個相鄰的有效向量與零向量的相對開關時間
由上面演算我們可以推得每個開關所需要經歷時間,就可以得到SPWM控制了
這邊詳細的請參考SVPWM分析、各个扇区详细计算以及Matlab仿真,這篇真的很詳細