Single-shunt VS Three-shunt
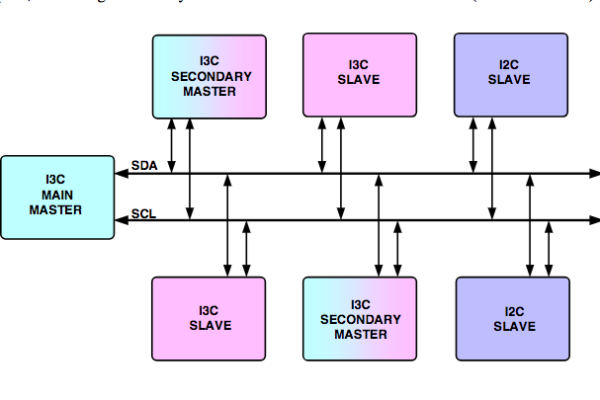
前言 這邊因設計參考需要,深入研究 single-shunt and three-shunt ,此篇文章會深入探討這2者差異與新舊版MCSDK的差異,另外深入介紹這2者Sensing的流程與差異 Shunt電阻設計 前一篇有提到不同Shunt電阻設計,這邊簡單針對系統回顧 基本上會分成3個部分Filter/offset/OPA,其中Filter是不一定會加上的部份,因為加上RC Filter會讓響應速度變慢,這邊會在一些速度控制上來說不一定是好的,但加入RC Filter可以提高在快速降速上避免OverShut的過大導致偵測錯誤Offset部分基本上一定要加因為ADC是無法收到負值,最後OPA部分就是看需求條配Gain值大小 3 shunt 介紹 3 shunt 電流偵測偵測的彈性度會比較高因公式𝐼𝑎 + 𝐼𝑏 + 𝐼𝑐 = 0 這邊3 shunt各取2項就可以推算出全部因此,相對1 shunt偵測不會有複雜的演算法和偵測死區,但成本上3 Shunt會比 1 Shunt設計來的高 The threeshunt technique can bounce sampling between current signals, selecting two out of three phases eachperiod, which allows long time periods for the current signals to […]
Single-shunt VS Three-shunt Read More »